UC Merced Computer Graphics Lab
Our research topics are categorized in the areas below.
(Note: Prof. Kallmann has moved to a full time position at Amazon Robotics. More information will be posted here.)
 We are working on several geometric planning algorithms for
visualization of navigation information, computation of optimal paths, GPU algorithms for path planning,
and navigation simulation systems.
We are working on several geometric planning algorithms for
visualization of navigation information, computation of optimal paths, GPU algorithms for path planning,
and navigation simulation systems.
People:
Renato Farias and Carlo Camporesi (now at Avametric)
Support:
2017 ARO Award W911NF-17-1-0463 2017 CITRIS Seed Funding
Recent Papers:
Integrating Local Collision Avoidance with Shortest Path Maps (EG)
Optimal Path Maps on the GPU (TVCG)
GPU-Based Max Flow Maps in the Plane (RSS)
Sample Papers:
Dynamic and Robust Local Clearance Triangulations, ACM TOG 2014
Computing Shortest Path Maps with GPU Shaders, MIG 2014
See Also:
Shortest Paths with Arbitrary Clearance from Navigation Meshes, SCA 2010
 We are working on several humanoid motion planning algorithms for
planning manipulation motions, whole-body coordinated motion, data-based planning, etc.
We are working on several humanoid motion planning algorithms for
planning manipulation motions, whole-body coordinated motion, data-based planning, etc.
People:
Alain Juarez-Perez and Mentar Mahmudi (now at EPFL)
Support:
NSF Award BCS-0821766
CITRIS Seed Funding
Sample Papers:
Coordinating Full-Body Interactions with the Environment SCA 2017
Geometric and Discrete Path Planning for Interactive Virtual Worlds, SIGGRAPH 2016 Course Notes
Planning Motions and Placements for Virtual Demonstrators TVCG 2015
Analyzing Locomotion Synthesis with Feature-Based Motion Graphs, TVCG 2012
See Also:
A Skill-Based Motion Planning Framework for Humanoids, ICRA 2010
Motion Planning and Autonomy for Virtual Humans, SIGGRAPH 2008 Course Notes

 We are investigating new human-computer interfaces based on
motion capture and virtual reality for
exploring the use of autonomous virtual humans
in education, training and rehabilitation.
We are investigating new human-computer interfaces based on
motion capture and virtual reality for
exploring the use of autonomous virtual humans
in education, training and rehabilitation.
People:
Carlo Camporesi and Yazhou Huang (now at EON Reality).
Support:
NSF Award CNS-1305196
Past Support:
NSF award IIS-0915665
NSF award CNS-0723281
CITRIS Seed Funding #128
HSRI San Joaquin Valley eHealth Network seed grant funded by AT&T
Sample papers:
The Effects of Avatars, Stereo Vision and Display Size on Reaching and Motion Reproduction, IEEE TVCG 2015
VR Solutions for Improving Physical Therapy, IEEE VR poster 2013
Interactive Motion Modeling and Parameterization by Direct Demonstration, IVA 2010
Interactive Demonstration of Pointing Gestures for Virtual Trainers, HCII 2009
 We have worked on deformation models based on fractional calculus.
Our approach has integrated fractional derivatives with
spring-mass systems in order to achieve
unique memory-laden characteristics.
We have worked on deformation models based on fractional calculus.
Our approach has integrated fractional derivatives with
spring-mass systems in order to achieve
unique memory-laden characteristics.
People:
Oktar Ozgen (now co-founder of Indoora)
Sample Papers:
Simulating the Dynamic Behavior of Shear Thickening Fluids, under review.
Simulating Colliding Flows in SPH with Fractional Derivatives, CAVW 2013
Underwater Cloth Simulation with Fractional Derivatives, TOG 2010
(Note: Prof. Kallmann has moved to a full time position at Amazon Robotics. More information will be posted here.)
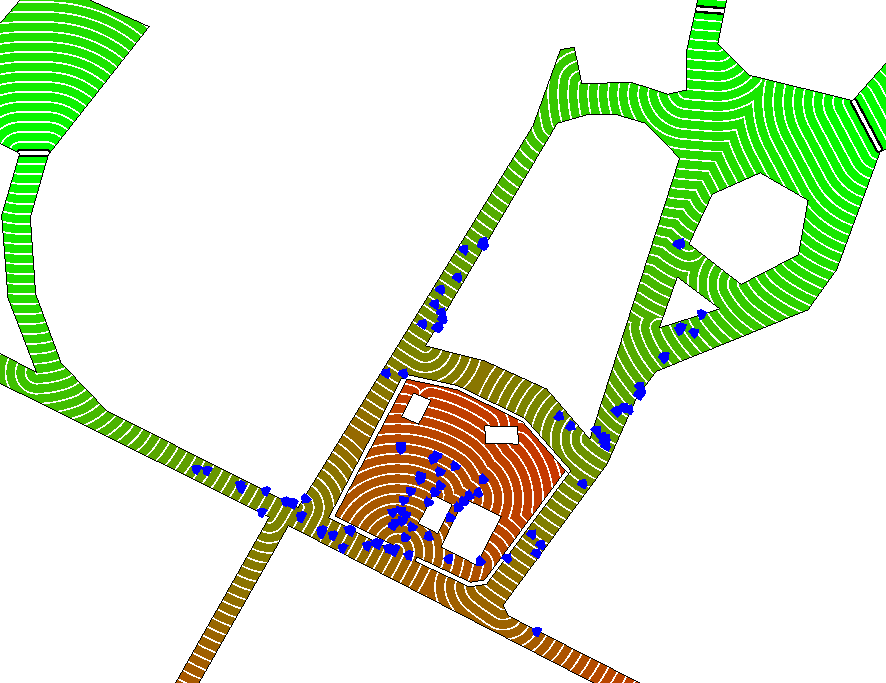
Navigation and Geometric Path Planning
We are working on several geometric planning algorithms for
visualization of navigation information, computation of optimal paths, GPU algorithms for path planning,
and navigation simulation systems.
People:
Renato Farias and Carlo Camporesi (now at Avametric)
Support:
2017 ARO Award W911NF-17-1-0463 2017 CITRIS Seed Funding
Recent Papers:
Integrating Local Collision Avoidance with Shortest Path Maps (EG)
Optimal Path Maps on the GPU (TVCG)
GPU-Based Max Flow Maps in the Plane (RSS)
Sample Papers:
Dynamic and Robust Local Clearance Triangulations, ACM TOG 2014
Computing Shortest Path Maps with GPU Shaders, MIG 2014
See Also:
Shortest Paths with Arbitrary Clearance from Navigation Meshes, SCA 2010
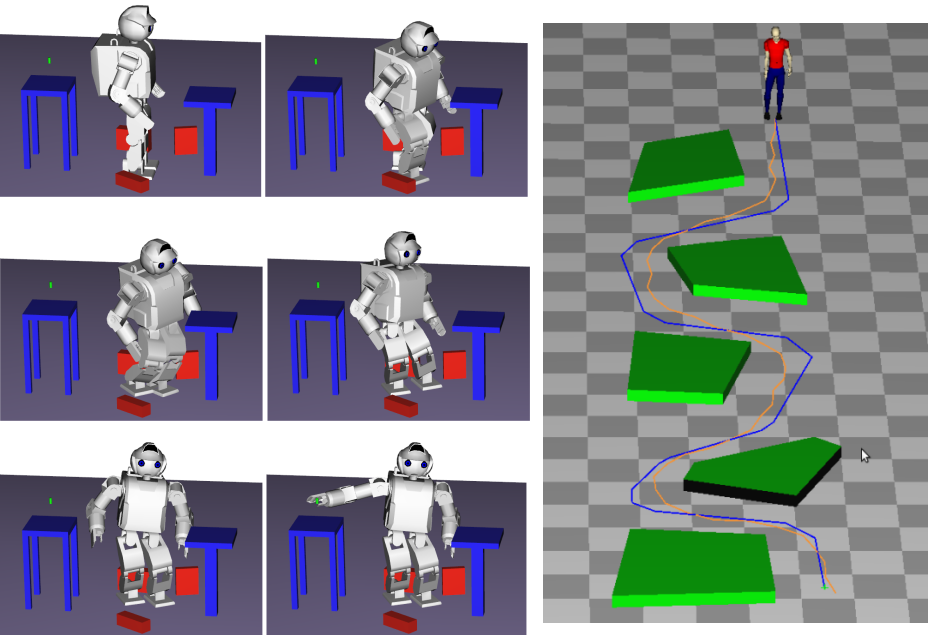
Motion Planning and Animation
We are working on several humanoid motion planning algorithms for
planning manipulation motions, whole-body coordinated motion, data-based planning, etc.
People:
Alain Juarez-Perez and Mentar Mahmudi (now at EPFL)
Support:
NSF Award BCS-0821766
CITRIS Seed Funding
Sample Papers:
Coordinating Full-Body Interactions with the Environment SCA 2017
Geometric and Discrete Path Planning for Interactive Virtual Worlds, SIGGRAPH 2016 Course Notes
Planning Motions and Placements for Virtual Demonstrators TVCG 2015
Analyzing Locomotion Synthesis with Feature-Based Motion Graphs, TVCG 2012
See Also:
A Skill-Based Motion Planning Framework for Humanoids, ICRA 2010
Motion Planning and Autonomy for Virtual Humans, SIGGRAPH 2008 Course Notes
Immersive Environments and Motion Capture Interfaces
We are investigating new human-computer interfaces based on
motion capture and virtual reality for
exploring the use of autonomous virtual humans
in education, training and rehabilitation.
People:
Carlo Camporesi and Yazhou Huang (now at EON Reality).
Support:
NSF Award CNS-1305196
Past Support:
NSF award IIS-0915665
NSF award CNS-0723281
CITRIS Seed Funding #128
HSRI San Joaquin Valley eHealth Network seed grant funded by AT&T
Sample papers:
The Effects of Avatars, Stereo Vision and Display Size on Reaching and Motion Reproduction, IEEE TVCG 2015
VR Solutions for Improving Physical Therapy, IEEE VR poster 2013
Interactive Motion Modeling and Parameterization by Direct Demonstration, IVA 2010
Interactive Demonstration of Pointing Gestures for Virtual Trainers, HCII 2009
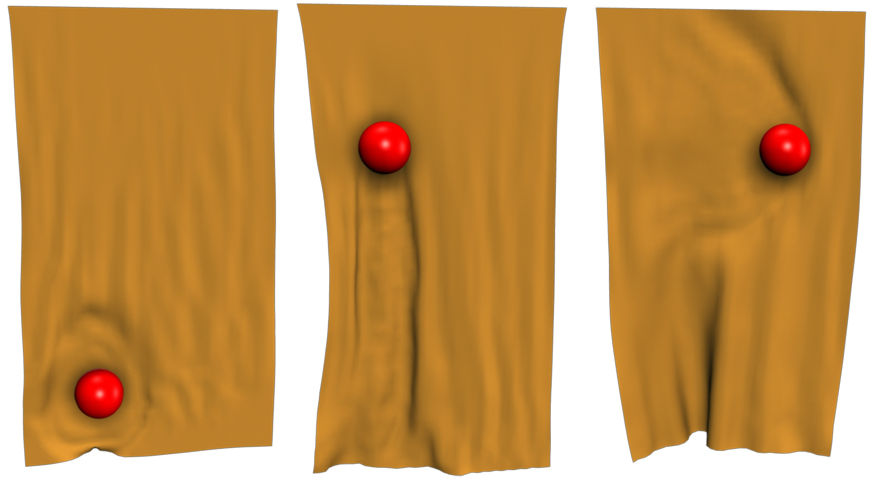
Deformable Objects
We have worked on deformation models based on fractional calculus.
Our approach has integrated fractional derivatives with
spring-mass systems in order to achieve
unique memory-laden characteristics.
People:
Oktar Ozgen (now co-founder of Indoora)
Sample Papers:
Simulating the Dynamic Behavior of Shear Thickening Fluids, under review.
Simulating Colliding Flows in SPH with Fractional Derivatives, CAVW 2013
Underwater Cloth Simulation with Fractional Derivatives, TOG 2010