Abstract:
Paper:

|
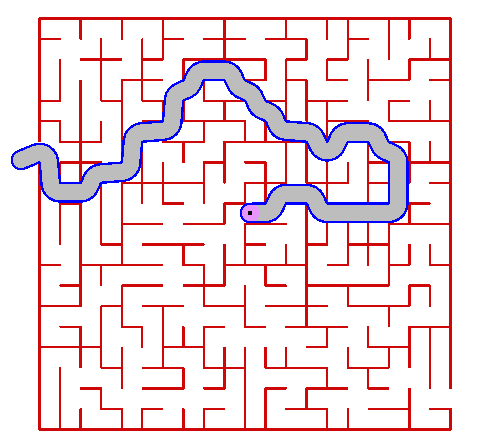
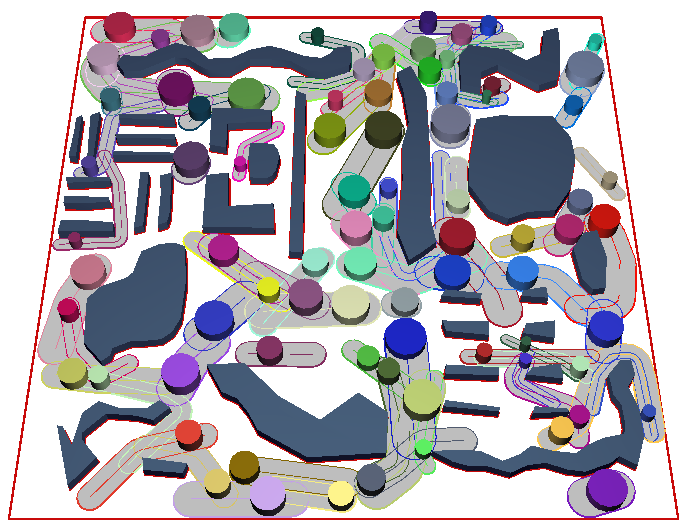
Shortest Paths with Arbitrary Clearance from Navigation Meshes Marcelo Kallmann Eurographics / SIGGRAPH Symposium on Computer Animation (SCA) Madrid, Spain, 2010 |
Errata 1: In an attempt to simplify the text, it is mentioned that the proposed locally shortest paths are computed in optimal time. This statement is however not accurate sometimes as it does not distinguish the precomputation time from the query time. For instance the channel search procedure (Section 5) can be easilly modified to run in O(n) time using available linear time planar graph search techniques.
Errata 2: The disturbance definition in the paper is incomplete as it does not account for possible cases where v is not connected to c.
An extended version of this paper including new features, adding missing citations, and addressing the issues above is still under preparation...
|
(43.6 MB .mov) |
Code:
The LCT implementation is now included in the tripath toolkit available here
Bibtex:
@inproceedings { kallmann10sca, author = { Marcelo Kallmann }, title = { Shortest Paths with Arbitrary Clearance from Navigation Meshes }, booktitle = { Proceedings of the Eurographics / SIGGRAPH Symposium on Computer Animation (SCA) }, year = { 2010 }, location = { Madrid, Spain } }
(for information on other projects, see our research and publications pages)