
Abstract:
Paper:

|
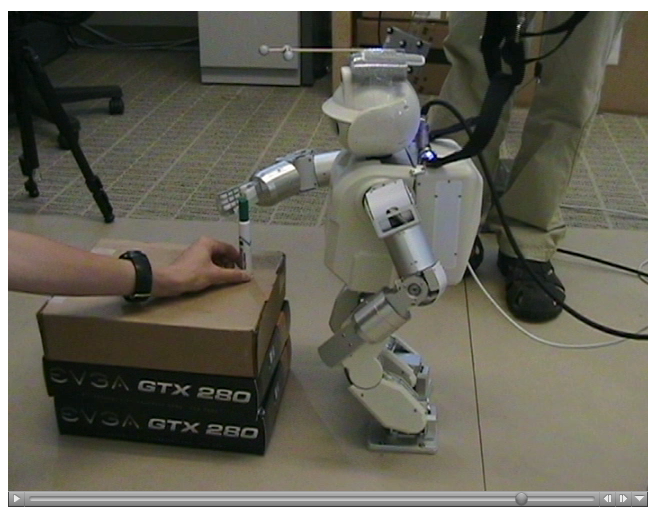
A Skill-Based Motion Planning Framework for Humanoids Marcelo Kallmann, Yazhou Huang and Robert Backman International Conference on Robotics and Automation (ICRA) Anchorage, Alaska, 2010 |
Video:
|
(47.6 MB .mov) |
Bibtex:
@inproceedings { kallmann10icra, author = { Marcelo Kallmann and Yazhou Huang and Robert Backman }, title = { A Skill-Based Motion Planning Framework for Humanoids }, booktitle = { Proceedings of the International Conference on Robotics and Automation (ICRA) }, location = { Anchorage, Alaska, United States }, year = { 2010 } }
(for information on other projects, see our research and publications pages)