Modeling Physically Simulated Characters with Motion Networks
|
|
|
Abstract:
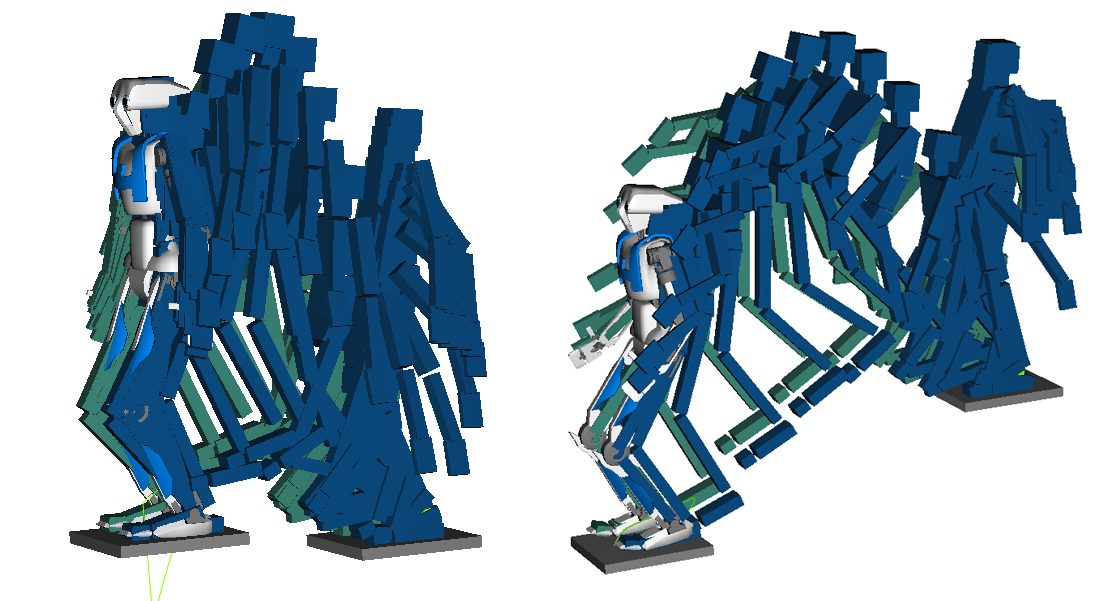
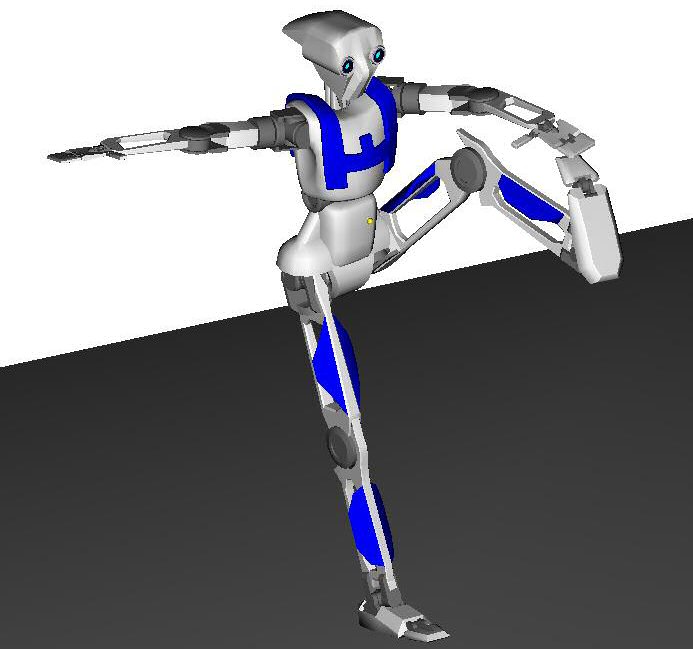
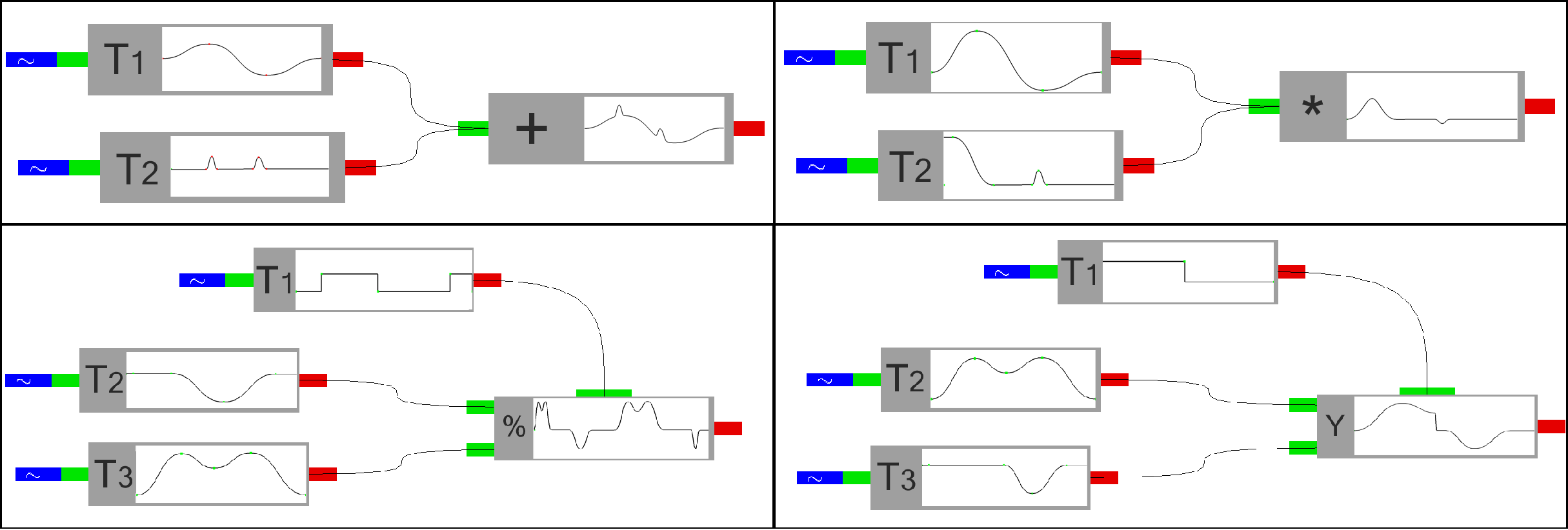
We present a system that allows non-programmers to create generic controllers for physically simulated characters. The core of our system is based on a directed acyclic graph of trajectory transformations, which can be modifed by feedback terms and serve as reference motions tracked by the physically simulated character. We then introduce tools to enable the automatic creation of robust and parametrized controllers suitable for running in real-time applications, such as in computer games. The entire process is accomplished by means of a graphical user interface and we demonstrate how our system can be intuitively used to design a simbicon-like walking controller and a parametrized jump controller to be used in real-time simulations.
Papers:
|
|
Modeling Physically Simulated Characters with Motion Networks Robert Backman and Marcelo Kallmann Motion in Games (MIG) 2012 (Runner up for best paper) |
Designing Controllers for Physics-Based Characters with
Motion Networks Robert Backman and Marcelo Kallmann Computer Animation and Virtual Worlds 24(6), 2013, 553-563 |
|
|
|
Video:
|
|
(22 MB .mp4) |
Bibtex:
@inproceedings{Back12mig,
author = {Robert Backman and Marcelo Kallmann},
title = {Modeling Physically Simulated Characters with Motion Networks},
booktitle = {Proceedings of the 5th International Conference on Motion In Games (MIG)},
year = {2012},
location = {Rennes, France}
}
@article{Back13cavw,
author = {Robert Backman and Marcelo Kallmann},
title = {Designing Controllers for Physics-Based Characters with Motion Networks},
booktitle = {Computer Animation and Virtual Worlds (CAVW)},
volume = {24}
number = {6},
pages = {553--563},
year = {2013}
}
|
(for information on other projects, see our research and publications pages)