Abstract:
Paper:

|
Analytical Inverse Kinematics with Body Posture Control Marcelo Kallmann Computer Animation and Virtual Worlds (CAVW) 19(2), 2008, 79-91 |
Videos:
Full body control examples: [5.1MB AVI], [1.1MB AVI]
Collision avoidance example: [4.6MB AVI]
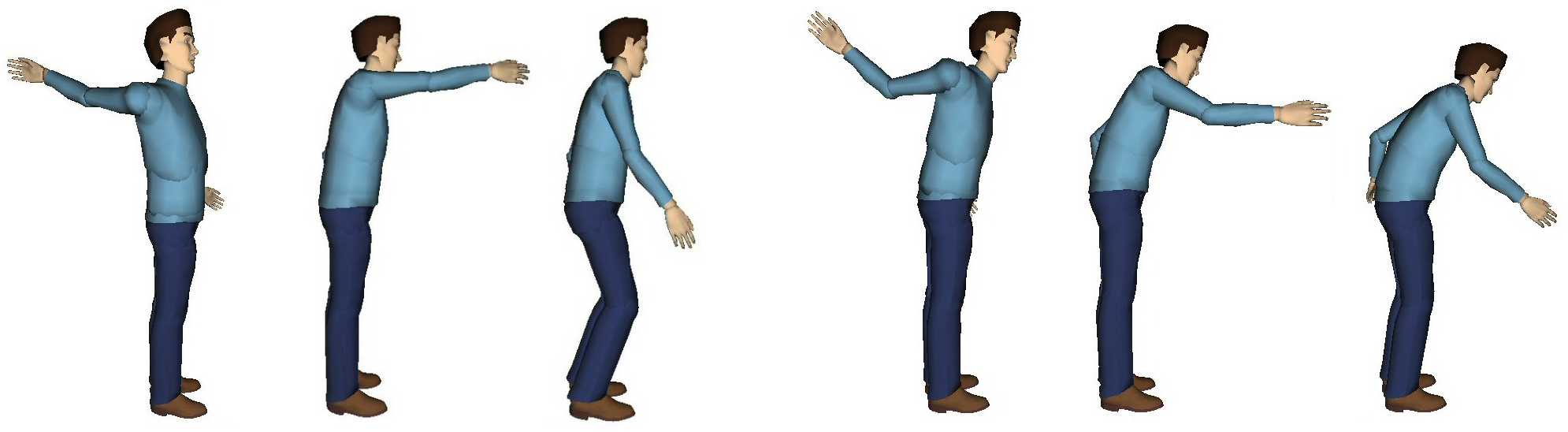
Editing body behavior/style: [12.8MB AVI]
Example of normal and tired behaviors: [3.5MB AVI]
Bibtex:
@article { kallmann08cavw, author = { Marcelo Kallmann }, title = { Analytical Inverse Kinematics with Body Posture Control }, journal = { Computer Animation and Virtual Worlds (CAVW) }, volume = { 19 }, number = { 2 }, pages = { 79--91 }, publisher = { John Wiley and Sons Ltd.}, year = { 2008 } }
(for information on other projects, see our research and publications pages)