Research Projects
|
|
Learning Humanoid Reaching Tasks in Dynamic Environments We propose a novel learning-based motion planning algorithm for solving humanoid reaching tasks in dynamic environments.
|
|
|
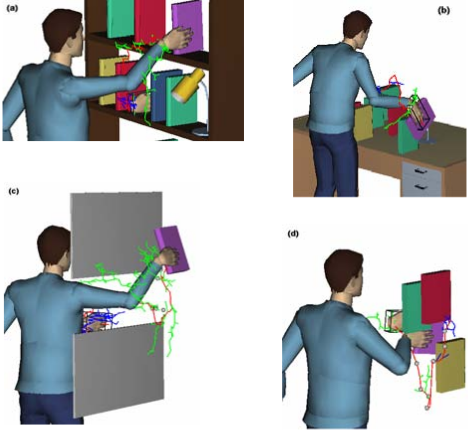
Toward Real-Time Object Manipulation in Dynamic Environments This wrok proposes a method designed to learn grasps from demonstrations and to learn reaching motions by executing tasks in realistic dynamic envionments. |