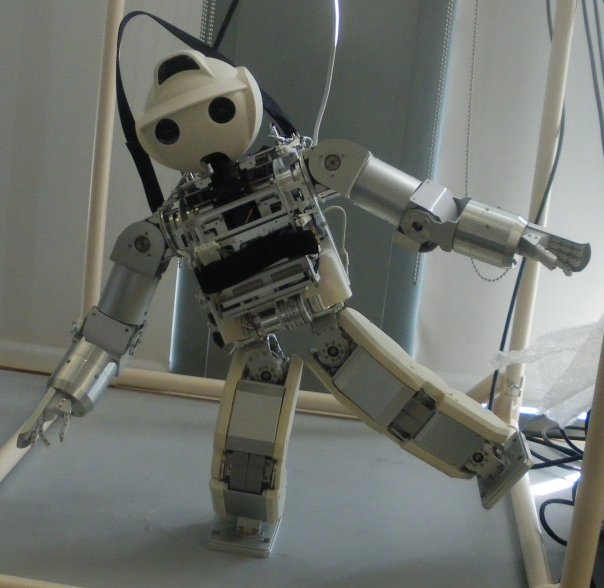
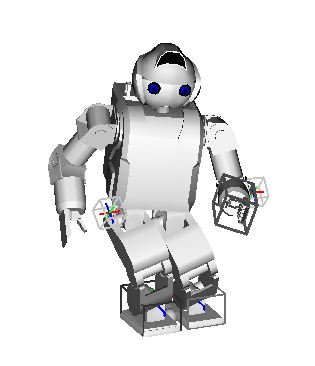
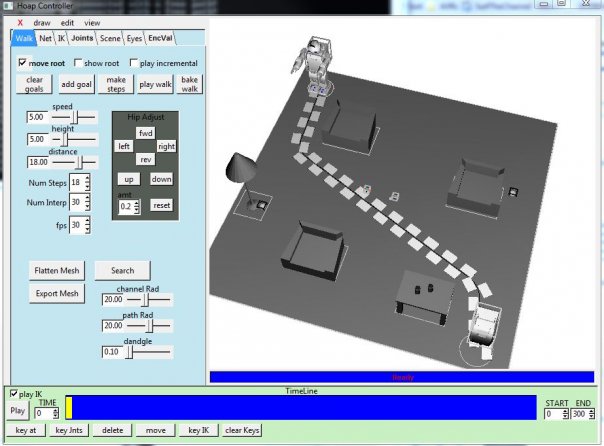
I spent some time during my junior year of college designing a control framework for a Fujitsu HOAP 3 humanoid robot. Check out my research section for publications related to it.
This is a video of the final project from my mechatronics class with Dave Auslander from UC Berkeley. It was a block printer that used two Scorbot robot arms a conveyor belt and a LabView interface.