EECS285 - Topics in Motion Planning - Spring 2016
Example images from final projects:
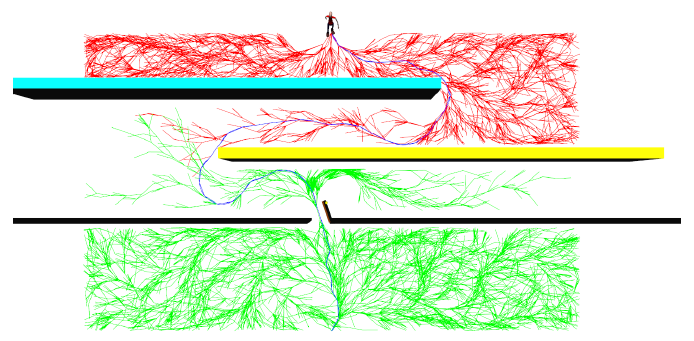
Alain Juarez-Perez -
Bidirectional RRT-like planner which can generate paths of controlled curvature:
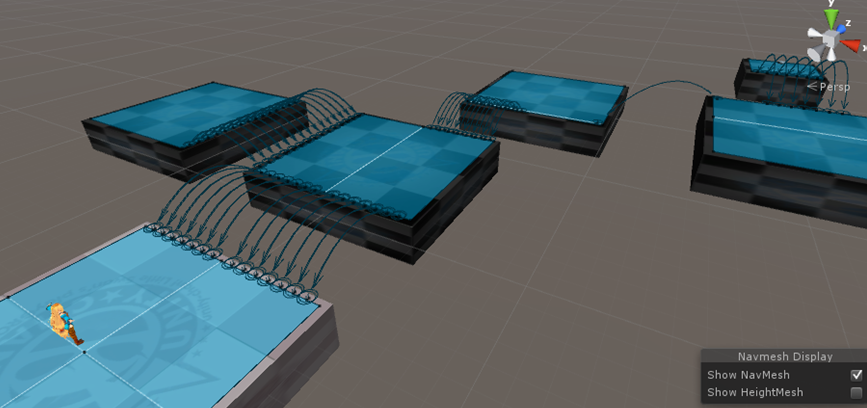
Hanbin Tao - Navigation mesh representing jumps between platforms:
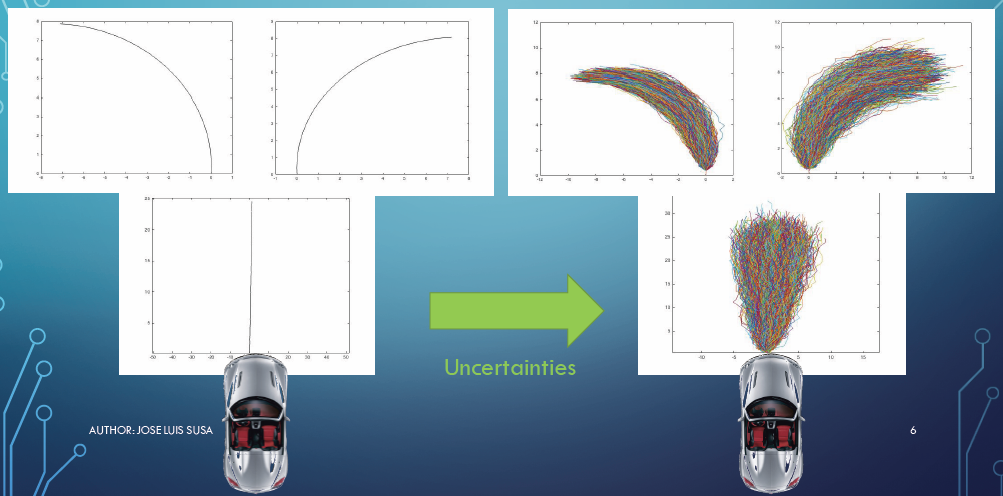
Jose Luis Susa Rincon - Constrained MDP with real data extraction and probabilities estimation:
Guoxiang Zhang, Michael Sanfilippo and Chengjie Qin -
Using SVMs for Experience-based Motion Planning:
Renato Farias - Extensions to Shortest Path Maps in GPU:
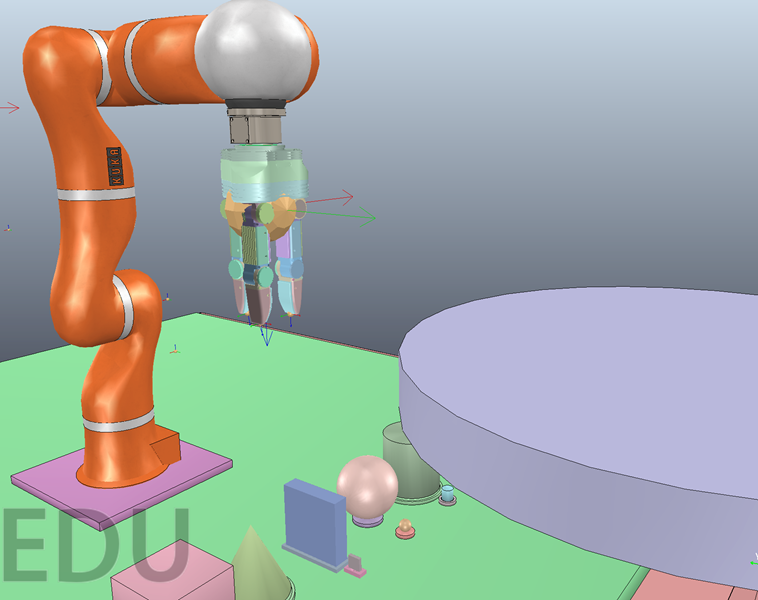
Shuo Liu and Andres Torres Garcia - Manipulation and Grasp Planning: