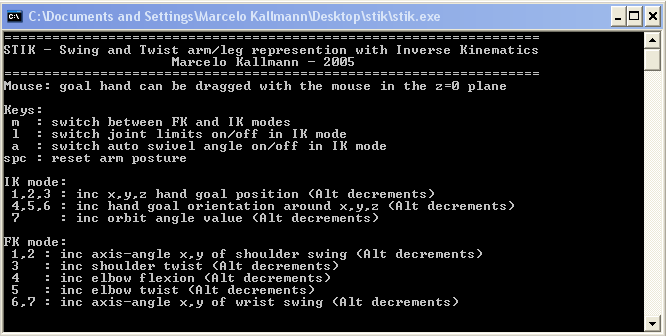
STIK - Swing and Twist Inverse Kinematics
Code
-
The source code requires
fltk 2.0 to be compiled, but it
comes with a windows executable (with instructions).
{kind=link}
-
Note: an extended version of this code is also available integrated within the
graphsim toolkit (update: graphsim is no longer maintained for public releases).
Videos
A video illustrating STIK in use can be found here.- A collision avoidance example can be seen
here.